Arduino Uno OpenLCB Test Node On the LCC Network
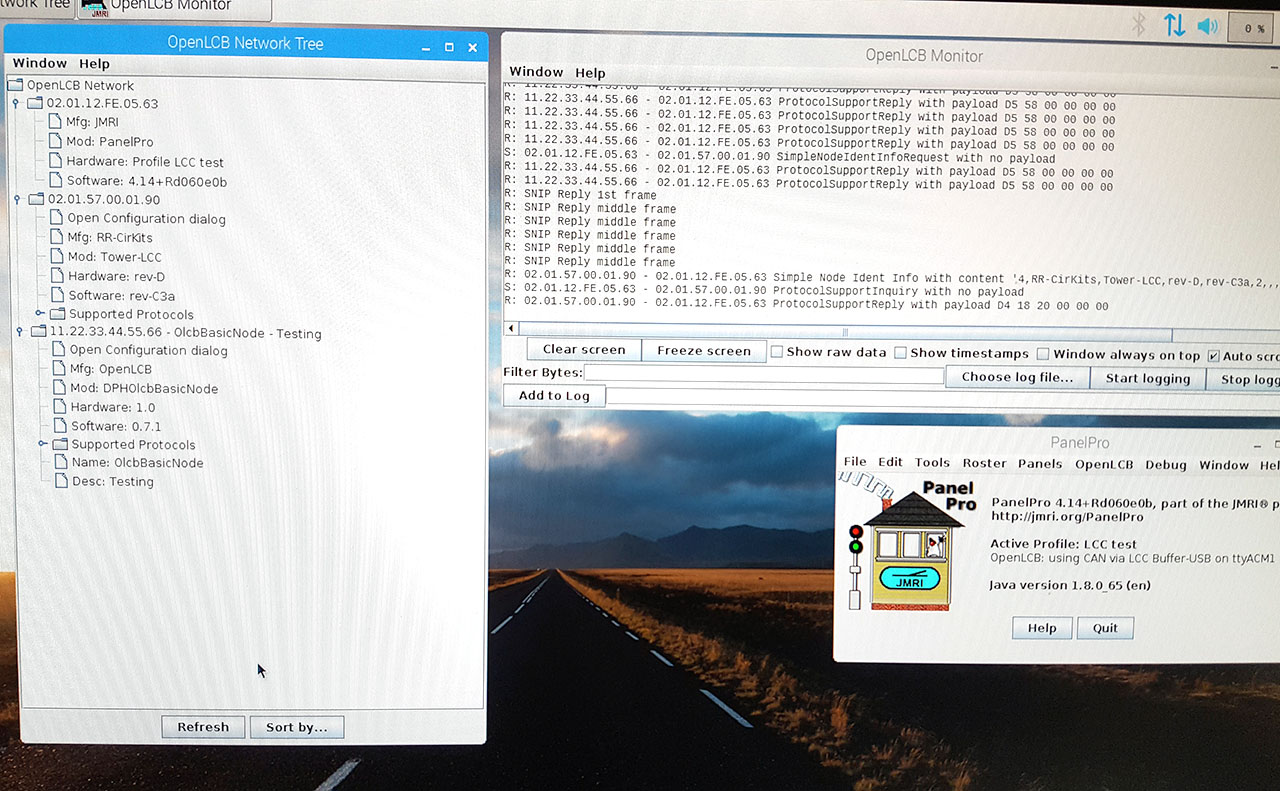
I have to say it, I wasn’t expecting it, but it happened. From a rather cold start (doofus here picked a wrong USB port for the RR-CirKits LCC Buffer device), to mach speed, in a blink of an eye. Proof is in the pudding (third entry in the list in the OpenLCB Network Tree window on the left). Hooray!
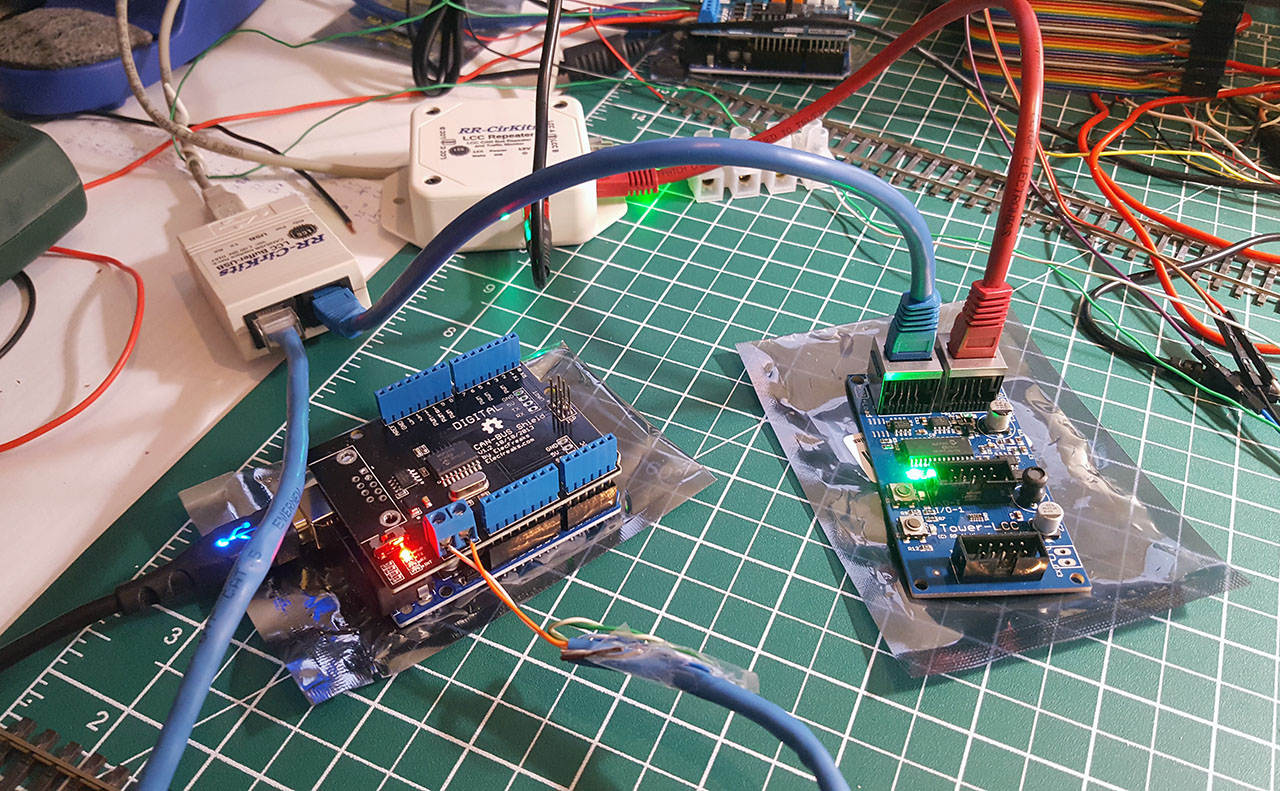
The setup is just cobbled together quickly to create a working LCC network. And from there, just an old Cat5 cable stripped off of the connector on one end. No termination on the node side either, but it’s a test, so not a biggy. What matters is that the node registers.
Why is this important you ask?
For starters, the code I got isn’t meant to run on Arduino Uno, or the generic CANbus shield. So, my integration is working, for now. What we need is a QA suite that could perform automated testing on any node against the described standard and verify operation. Maybe I’ll deal with that some day.
More importantly, you, me, teenage Joe and his grandfather who’s into model railroading should be able to pick an Arduino (generally something better than Uno) at the local corner store and a generic CANbus shield, upload a sketch and voila. New node on the LCC network, that can do whatever that sketch intends it to. That’s my vision of the future.
Right now, the OpenLCB group uses quite specific hardware for their testing and dev. boards. Beside not being able to find some of that hardware anymore (for example AT90CAN boards) others are not as ubiquitous as Uno.
I’m sure eventually the group could reach a point of bringing OpenLCB to as many platforms as there are, but I got no time to wait for that (progress is slow as-is for my liking). Therefore, I’m fast-tracking this for my purposes, and if I succeed, then everyone else will benefit from it. Besides, I like tinkering with things…although I should be building a layout, hmm.